# A tibble: 34 × 27
x y elev t_1 t_2 t_3 t_4 t_5 t_6 t_7 t_8
<dbl> <dbl> <int> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl> <dbl>
1 6.09 3.20 102 -6.39 -3.61 3.72 6.78 12.6 18.4 20 20.1
2 6.25 3.26 1 -6.28 -4.11 2.61 6.56 11.4 16.8 18.4 18.7
3 6.16 3.48 157 -11.1 -9.44 -0.389 3.94 9.89 15.4 17.5 17.4
4 6.12 3.53 176 -11.6 -9.72 -1.17 2.89 9.67 14.8 17.4 16.9
5 6.00 3.28 400 -12.6 -9.06 -1.61 2.56 8.56 14.3 15.9 15.8
6 6.05 3.23 133 -9.11 -6.39 1.22 4.94 10.9 15.9 17.3 17.6
7 6.10 3.18 56 -7.94 -6.06 2.06 5.56 11.1 17 18.6 18.8
8 6.07 3.14 59 -6.56 -3.5 3.17 6.17 11.5 17.4 19.1 19.4
9 6.17 3.46 160 -9.94 -8.94 -0.278 3.56 9.61 15.3 17.7 17.3
10 6.01 3.33 360 -12.3 -9.44 -1.5 2.94 9 14.5 17 16.9
# … with 24 more rows, and 16 more variables: t_9 <dbl>, t_10 <dbl>,
# t_11 <dbl>, t_12 <dbl>, t_13 <dbl>, t_14 <dbl>, t_15 <dbl>,
# t_16 <dbl>, t_17 <dbl>, t_18 <dbl>, t_19 <dbl>, t_20 <dbl>,
# t_21 <dbl>, t_22 <dbl>, t_23 <dbl>, t_24 <dbl>Spatio-temporal Models
Lecture 24
Dr. Colin Rundel
Spatial Models with
AR time dependence
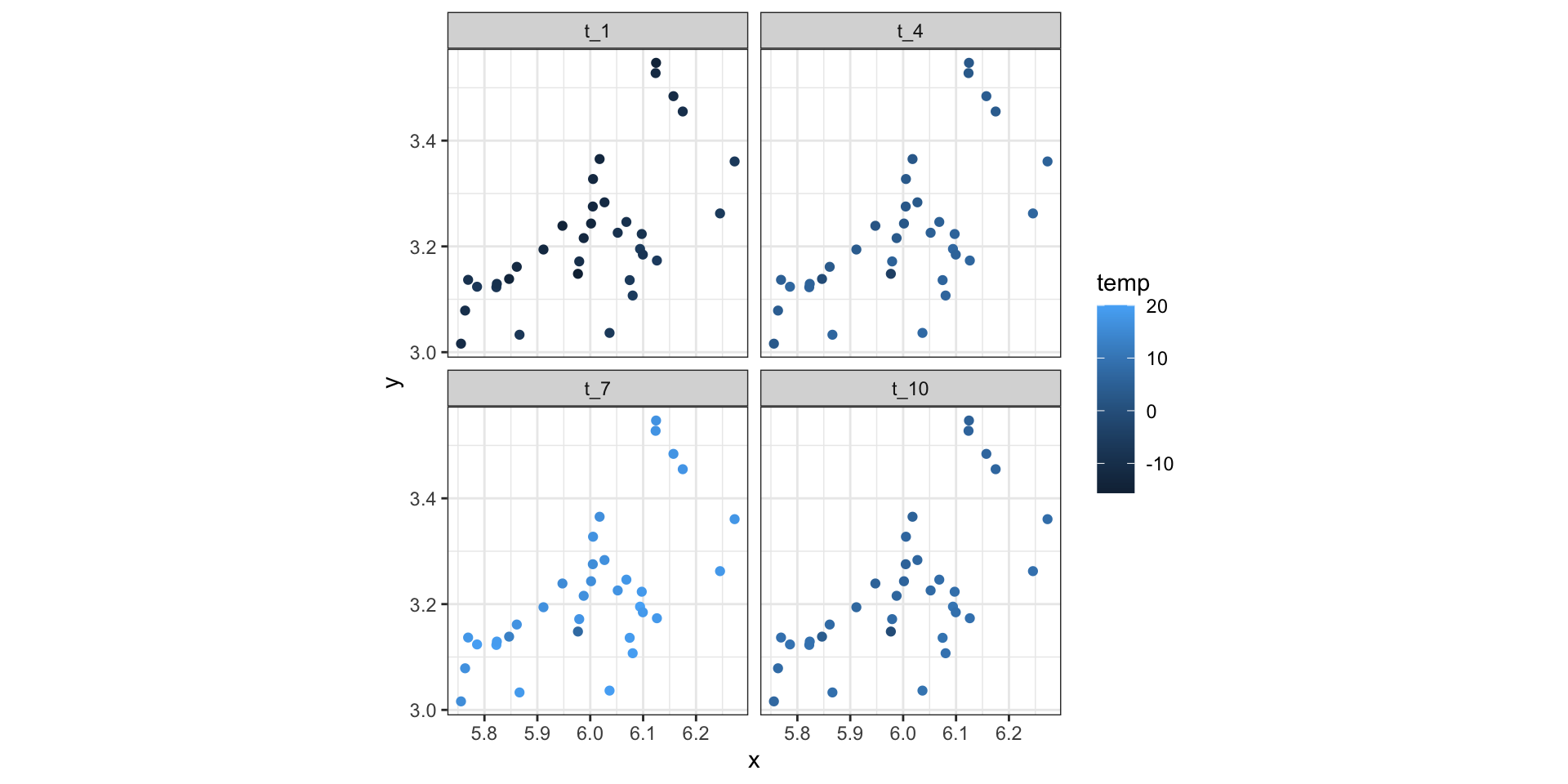
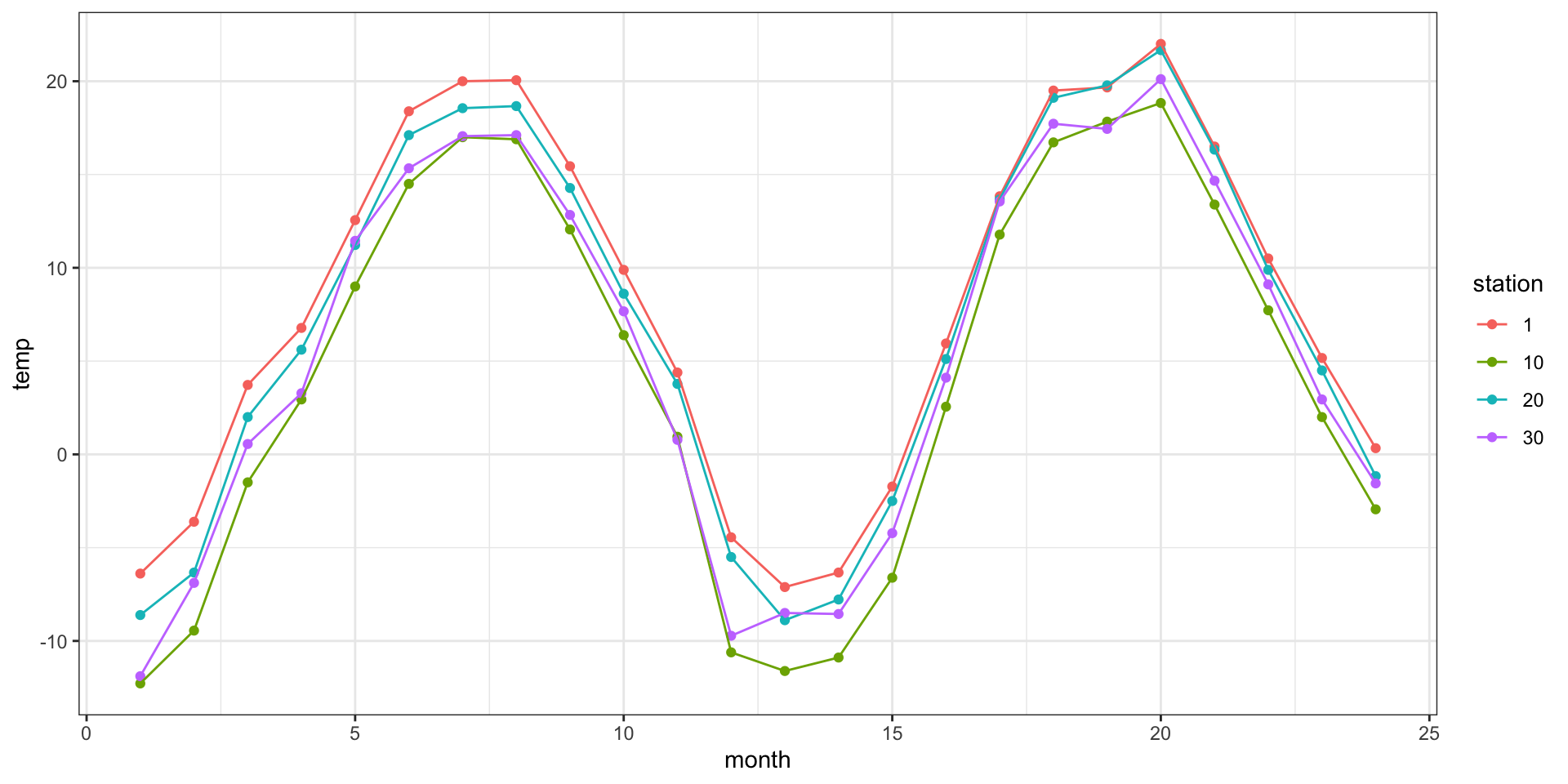
Example - Weather station data
NETemp.dat - Monthly temperature data (Celsius) recorded across the Northeastern US starting in January 2000.
Dynamic Linear / State Space Models (time)
\[ \begin{aligned} \underset{1\times1}{{y}_t} &= \underset{1 \times p}{\boldsymbol{F}'_t} ~ \underset{p \times 1}{\boldsymbol{\theta}_t} + {{v}_t} &\qquad\qquad\text{observation equation}\\ \underset{p\times 1}{\boldsymbol{\theta}_t} &= \underset{p \times p}{\boldsymbol{G}_t} ~ \underset{p \times 1}{\boldsymbol{\theta}_{t-1}}+ \underset{p \times 1}{\boldsymbol{\omega}_t} &\qquad\qquad\text{evolution equation}\\ \end{aligned} \]
\[ \begin{aligned} \boldsymbol{v}_t &\sim \mathcal{N}(0,\boldsymbol{V}_t) \\ \boldsymbol{\omega}_t &\sim \mathcal{N}(0,\boldsymbol{W}_t) \\ \end{aligned} \]
DLM vs ARMA
ARMA / ARIMA are special cases of the more general dynamic linear model framework, for example an \(AR(p)\) can be written as
\[ F_t' = (1, 0, \ldots, 0) \] \[ G_t = \begin{pmatrix} \phi_1 & \phi_2 & \cdots & \phi_{p-1} & \phi_p \\ 1 & 0 & \cdots & 0 & 0 \\ 0 & 1 & \cdots & 0 & 0 \\ \vdots & \vdots & \ddots & \vdots & 0 \\ 0 & 0 & \cdots & 1 & 0 \\ \end{pmatrix} \] \[ \begin{aligned} \omega_t &= (\omega_1, 0, \ldots, 0), \quad &\omega_1 \sim \mathcal{N}(0,\,\sigma^2) \end{aligned} \]
\[ \begin{aligned} y_t &= \theta_t + v_t \\ \theta_t &= \sum_{i=1}^p \phi_i\, \theta_{t-i} + \omega_1 \\ v_t &\sim \mathcal{N}(0,\, \sigma^2_v) \\ \omega_1 &\sim \mathcal{N}(0,\, \sigma^2_\omega) \\ \end{aligned} \]
Dynamic spatio-temporal model
The observed temperature at time \(t\) and location \(s\) is given by \(y_t(s)\) where,
\[ \begin{aligned} y_t(\boldsymbol{s}) & = \boldsymbol{x}_t(\boldsymbol{s})\boldsymbol{\beta}_t + u_t(\boldsymbol{s}) + \epsilon_t(\boldsymbol{s}) \\ \epsilon_t(\boldsymbol{s}) &\stackrel{ind}\sim \mathcal{N}(0,\tau_{t}^2) \\ \\ \boldsymbol{\beta}_t & = \boldsymbol{\beta}_{t-1} + \boldsymbol{\eta}_t \\ \boldsymbol{\eta}_t &\stackrel{i.i.d.}\sim \mathcal{N}(0,\boldsymbol{\Sigma}_{\eta}) \\ \\ u_t(\boldsymbol{s}) &= u_{t-1}(\boldsymbol{s}) + w_t(\boldsymbol{s}) \\ w_t(\boldsymbol{s}) &\stackrel{ind.}{\sim} \mathcal{N}\left(\boldsymbol{0}, \Sigma_t(\phi_t, \sigma^2_t)\right) \end{aligned} \]
Additional assumptions for \(t=0\),
\[ \begin{aligned} \boldsymbol{\beta}_{0} &\sim \mathcal{N}(\boldsymbol{\mu}_0, \boldsymbol{\Sigma}_0) \\ u_{0}(\boldsymbol{s}) &= 0 \end{aligned} \]
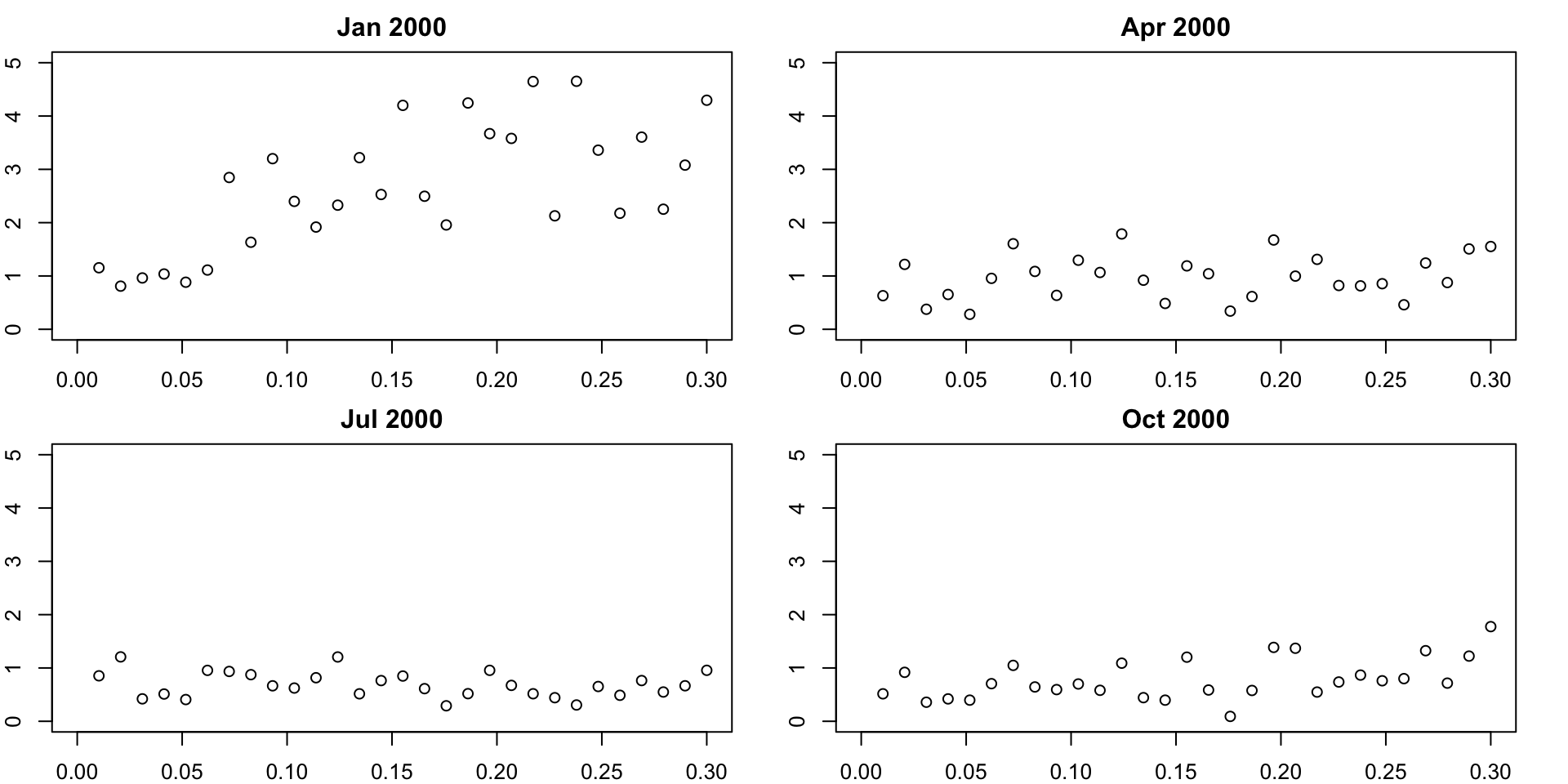
Variograms by time
Data and Model Parameters
Data:
Parameters:
n_beta = 2
starting = list(
beta = rep(0, n_t * n_beta), phi = rep(3/(max_d/4), n_t),
sigma.sq = rep(1, n_t), tau.sq = rep(1, n_t),
sigma.eta = diag(0.01, n_beta)
)
tuning = list(phi = rep(1, n_t))
priors = list(
beta.0.Norm = list(rep(0, n_beta), diag(1000, n_beta)),
phi.Unif = list(rep(3/(0.9 * max_d), n_t), rep(3/(0.05 * max_d), n_t)),
sigma.sq.IG = list(rep(2, n_t), rep(2, n_t)),
tau.sq.IG = list(rep(2, n_t), rep(2, n_t)),
sigma.eta.IW = list(2, diag(0.001, n_beta))
)Fitting with spDynLM from spBayes
n_samples = 10000
models = lapply(paste0("t_",1:24, "~elev"), as.formula)
m = spBayes::spDynLM(
models, data = ne_temp, coords = coords, get.fitted = TRUE,
starting = starting, tuning = tuning, priors = priors,
cov.model = "exponential", n.samples = n_samples, n.report = 1000
)
## ----------------------------------------
## General model description
## ----------------------------------------
## Model fit with 34 observations in 24 time steps.
##
## Number of missing observations 0.
##
## Number of covariates 2 (including intercept if specified).
##
## Using the exponential spatial correlation model.
##
## Number of MCMC samples 10000.
##
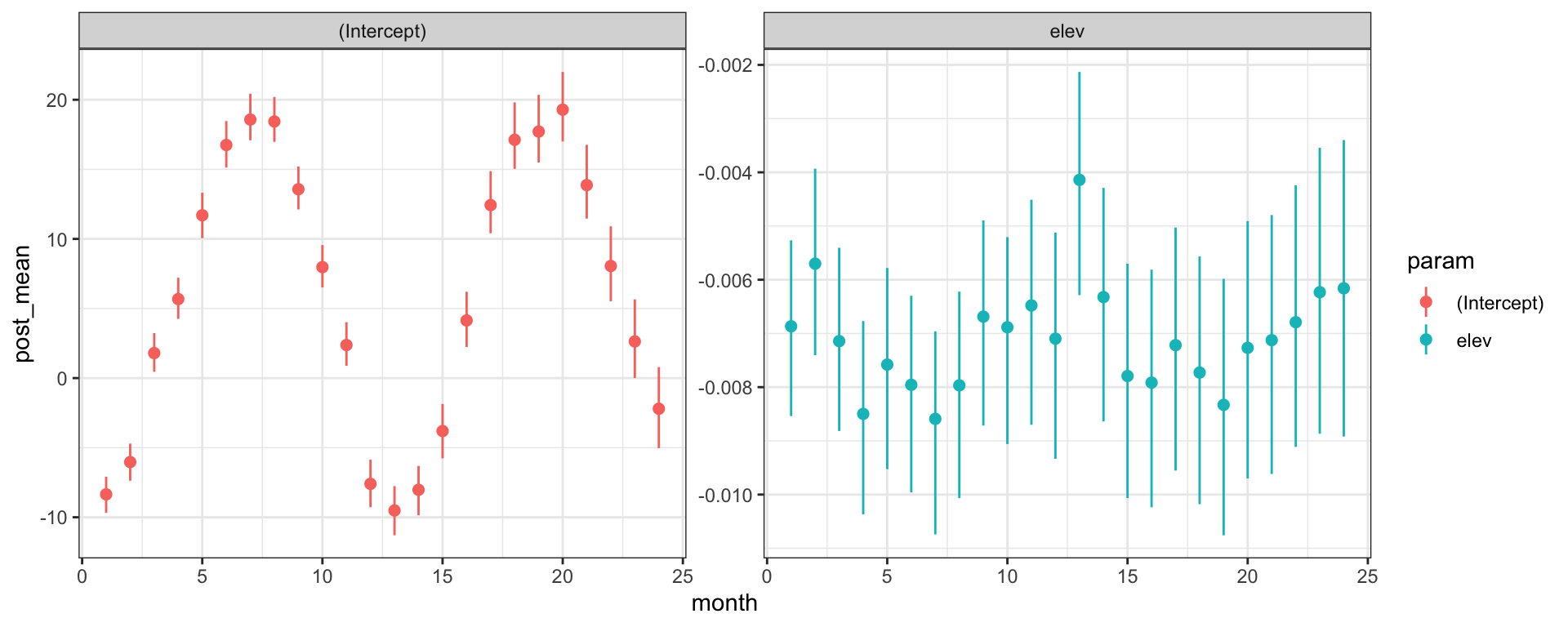
## ...Posterior Inference - \(\beta\)s
Posterior Inference - \(\theta\)

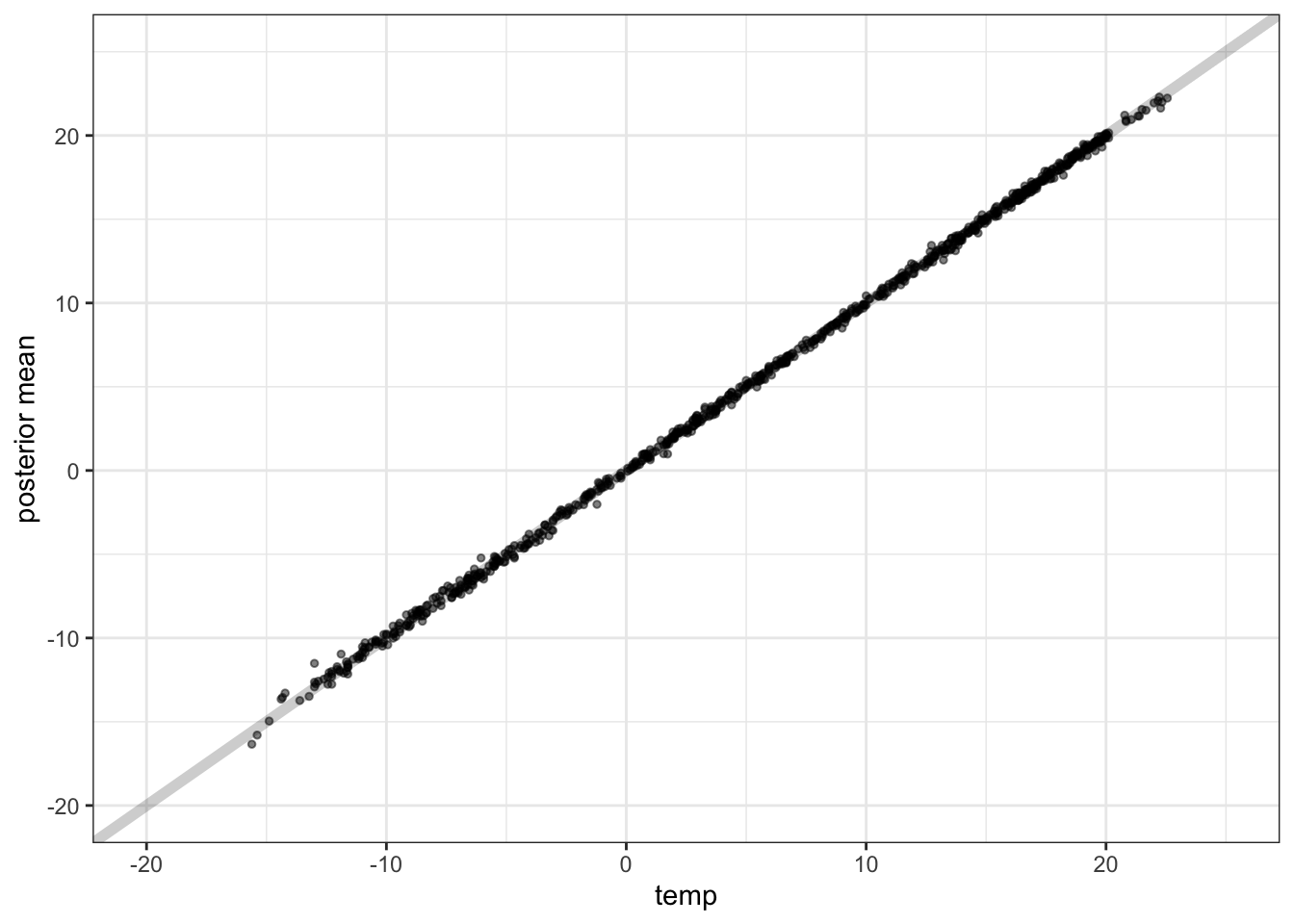
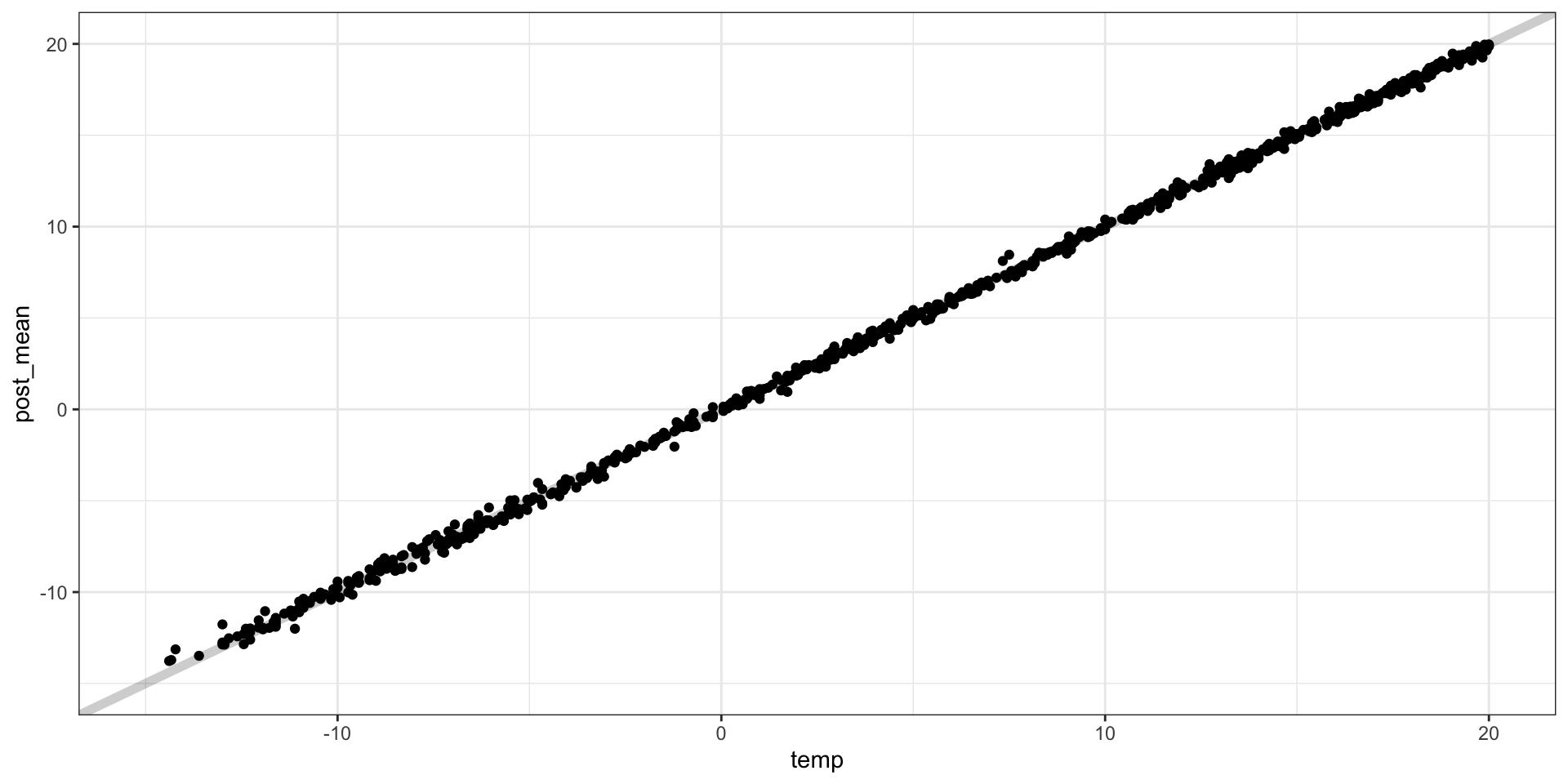
Posterior Inference - Observed vs. Predicted
Prediction
spPredict does not support spDynLM objects but it will impute missing values.
models_pred = lapply(paste0("t_",1:n_t, "~1"), as.formula)
n_samples = 5000
m_pred = spBayes::spDynLM(
models_pred, data = pred, coords = coords_pred, get.fitted = TRUE,
starting = starting, tuning = tuning, priors = priors,
cov.model = "exponential", n.samples = n_samples, n.report = 1000)
## ----------------------------------------
## General model description
## ----------------------------------------
## Model fit with 434 observations in 24 time steps.
##
## Number of missing observations 9600.
##
## Number of covariates 1 (including intercept if specified).
##
## Using the exponential spatial correlation model.
##
## Number of MCMC samples 5000.Predictive performance
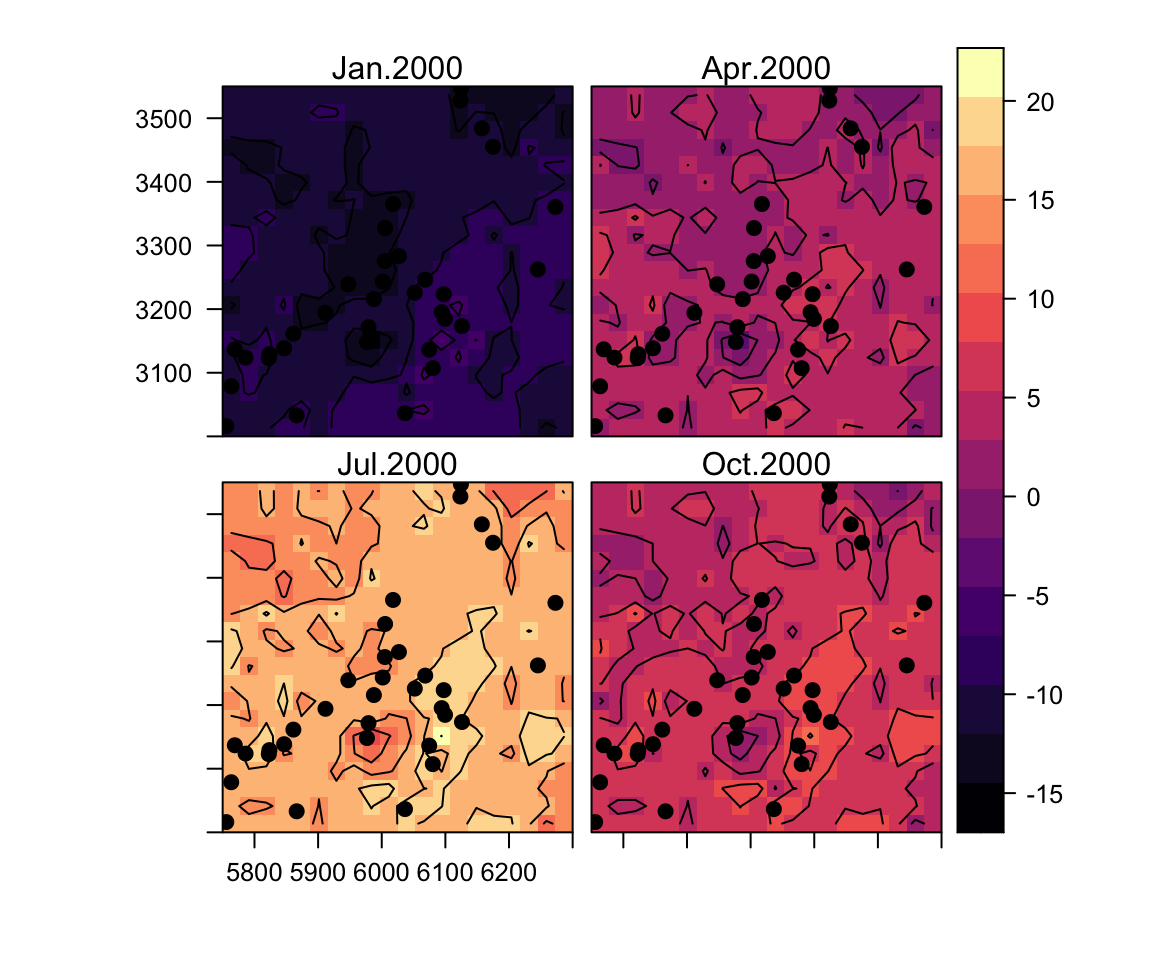
Predictive surfaces
Out-of-sample validation
# A tibble: 34 × 29
x y elev type station t_1 t_10 t_11 t_12 t_13
<dbl> <dbl> <int> <chr> <int> <dbl> <dbl> <dbl> <dbl> <dbl>
1 6.09 3.20 102 test 1 NA NA NA NA NA
2 6.25 3.26 1 train 2 -6.28 8.89 3.89 -4.22 -7.11
3 6.16 3.48 157 train 3 -11.1 6.44 1.94 -8.72 -11.6
4 6.12 3.53 176 train 4 -11.6 5.94 1.67 -9.17 -11.8
5 6.00 3.28 400 train 5 -12.6 5.67 0.278 -10.7 -11.9
6 6.05 3.23 133 train 6 -9.11 7.56 2.44 -7.11 -9.44
7 6.10 3.18 56 test 7 NA NA NA NA NA
8 6.07 3.14 59 train 8 -6.56 9.61 4.17 -4.89 -6.06
9 6.17 3.46 160 train 9 -9.94 6.67 1.72 -8.44 -12.1
10 6.01 3.33 360 train 10 -12.3 6.39 0.944 -10.6 -11.6
# … with 24 more rows, and 19 more variables: t_14 <dbl>, t_15 <dbl>,
# t_16 <dbl>, t_17 <dbl>, t_18 <dbl>, t_19 <dbl>, t_2 <dbl>,
# t_20 <dbl>, t_21 <dbl>, t_22 <dbl>, t_23 <dbl>, t_24 <dbl>,
# t_3 <dbl>, t_4 <dbl>, t_5 <dbl>, t_6 <dbl>, t_7 <dbl>, t_8 <dbl>,
# t_9 <dbl>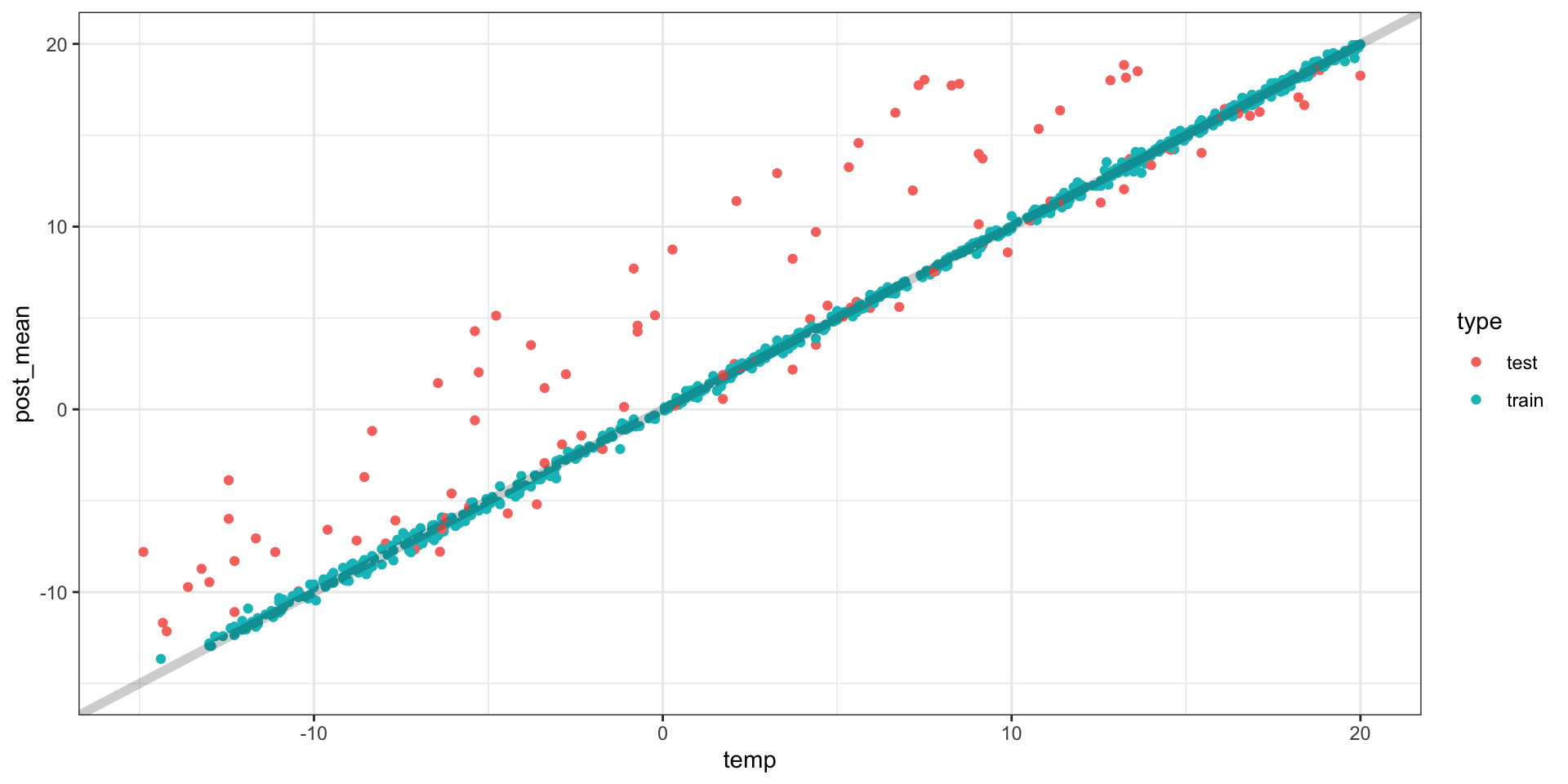
Spatio-temporal models for continuous time
Additive Models
In general, spatiotemporal models will have a form like the following,
\[ \begin{aligned} y(\boldsymbol{s},{t}) &= \underset{\text{mean structure}}{\mu(\boldsymbol{s},{t})} + \underset{\text{error structure}}{{e}(\boldsymbol{s},{t})} \\ &= \underset{\text{Regression}}{\boldsymbol{x}(\boldsymbol{s},{t}) \, \boldsymbol{\beta}(\boldsymbol{s},{t})} + \underset{\text{Spatiotemporal RE}}{{w}(\boldsymbol{s},{t})} + \underset{\text{White Noise}}{\epsilon(\boldsymbol{s},{t})} \end{aligned} \]
The simplest possible spatiotemporal model is one where we assume there is no dependence between observations in space and time,
\[ w(\boldsymbol{s},t) = \alpha(t) + \omega(\boldsymbol{s}) \]
these are straight forward to fit and interpret but are quite limiting (no shared information between space and time).
Spatiotemporal Covariance
Lets assume that we want to define our spatiotemporal random effect to be a single stationary Gaussian Process (in 3 dimensions\(^\star\)), \[ \boldsymbol{w}(\boldsymbol{s},\boldsymbol{t}) \sim \mathcal{N}\big(\boldsymbol{0}, \boldsymbol{\Sigma}(\boldsymbol{s},\boldsymbol{t})\big) \] where our covariance function depends on both \(\lVert s-s'\rVert\) and \(\lvert t-t'\rvert\), \[ \text{cov}(\boldsymbol{w}(\boldsymbol{s},\boldsymbol{t}), \boldsymbol{w}(\boldsymbol{s}',\boldsymbol{t}')) = c(\lVert s-s'\rVert, \lvert t-t'\rvert) \]
Note that the resulting covariance matrix \(\Sigma\) will be of size \(n_s \cdot n_t \times n_s \cdot n_t\).
Even for modest problems this gets very large (past the point of direct computability).
If \(n_t = 52\) and \(n_s = 100\) we have to work with a \(5200 \times 5200\) covariance matrix
Separable Models
One solution is to use a seperable form, where the covariance is the product of a valid 2d spatial and a valid 1d temporal covariance / correlation function, \[ \text{cov}(\boldsymbol{w}(\boldsymbol{s},\boldsymbol{t}), \boldsymbol{w}(\boldsymbol{s}',\boldsymbol{t}')) = \sigma^2 \, \rho_1(\lVert \boldsymbol{s}-\boldsymbol{s}'\rVert;\boldsymbol{\theta}) \, \rho_2(\lvert \boldsymbol{t}-\boldsymbol{t}' \rvert; \boldsymbol{\phi}) \]
If we define our observations as follows (stacking time locations within spatial locations)
\[ \boldsymbol{w}(\boldsymbol{s},\boldsymbol{t}) = \big( w(\boldsymbol{s}_1,t_1) ,\, \cdots ,\, w(\boldsymbol{s}_1,t_{n_t}) ,\, \cdots ,\, w(\boldsymbol{s}_{n_s},t_1) ,\, \cdots ,\, w(\boldsymbol{s}_{n_s},t_{n_t}) \big)^t \]
then the covariance can be written as
\[ \underset{n_s n_t \,\times\, n_s n_t}{\boldsymbol{\Sigma}_w(\sigma^2, \theta, \phi)} = \sigma^2 \, \underset{n_s \,\times\, n_s}{\boldsymbol{H}_s(\theta)} \otimes \underset{n_t \,\times\, n_t}{\boldsymbol{H}_t(\phi)} \]
where \(\boldsymbol{H}_s(\theta)\) and \(\boldsymbol{H}_t(\theta)\) are correlation matrices defined by
\[ \begin{aligned} \{\boldsymbol{H}_s(\theta)\}_{ij} &= \rho_1(\lVert \boldsymbol{s}_i - \boldsymbol{s}_j \rVert; \theta) \\ \{\boldsymbol{H}_t(\phi)\}_{ij} &= \rho_2(\lvert t_i - t_j \rvert; \phi) \\ \end{aligned} \]
Kronecker Product
Definition:
\[ \begin{aligned} \underset{[m \times n]}{\boldsymbol{A}} \otimes \underset{[p \times q]}{\boldsymbol{B}} = \underset{[m \cdot p \times n \cdot q]}{\begin{pmatrix} a_{11} \boldsymbol{B} & \cdots & a_{1n} \boldsymbol{B} \\ \vdots & \ddots & \vdots \\ a_{m1} \boldsymbol{B} & \cdots & a_{mn} \boldsymbol{B} \\ \end{pmatrix}} \end{aligned} \]
Properties:
\[ \begin{aligned} \boldsymbol{A} \otimes \boldsymbol{B} &\ne \boldsymbol{B} \otimes \boldsymbol{A} \qquad\text{(usually)} \\ (\boldsymbol{A} \otimes \boldsymbol{B})^t &= \boldsymbol{A}^t \otimes \boldsymbol{B}^t \\ \\ \det(\boldsymbol{A} \otimes \boldsymbol{B}) &= \det(\boldsymbol{B} \otimes \boldsymbol{A}) \\ &=\det(\boldsymbol{A})^{\text{rank}(\boldsymbol{B})} \det(\boldsymbol{B})^{\text{rank}(\boldsymbol{A})} \\ \\ (\boldsymbol{A} \otimes \boldsymbol{B})^{-1} &= \boldsymbol{A}^{-1} \otimes \boldsymbol{B}^{-1} \end{aligned} \]
Kronecker Product and MVN Likelihoods
If we have a spatiotemporal random effect with a separable form, \[ \boldsymbol{w}(\boldsymbol{s},\boldsymbol{t}) \sim \mathcal{N}(\boldsymbol{0},\, \boldsymbol{\Sigma}_w) \] \[ \boldsymbol{\Sigma}_w = \sigma^2 \, \boldsymbol{H}_s \otimes \boldsymbol{H}_t \]
then the likelihood for \(\boldsymbol{w}\) is given by
\[ \begin{aligned} &-\frac{n}{2}\log 2\pi - \frac{1}{2} \log |\boldsymbol{\Sigma_w}| - \frac{1}{2} \boldsymbol{w}^t \boldsymbol{\Sigma_w}^{-1} \boldsymbol{w} \\ = &-\frac{n}{2}\log 2\pi - \frac{1}{2} \log \left[ (\sigma^2)^{n_t \cdot n_s} |\boldsymbol{H_s}|^{n_t} |\boldsymbol{H_t}|^{n_s}\right] - \frac{1}{2\sigma^2} \boldsymbol{w}^t (\boldsymbol{H}_s^{-1} \otimes \boldsymbol{H}_t^{-1}) \boldsymbol{w} \end{aligned} \]
Non-seperable Models
Additive and separable models are still somewhat limiting
Cannot treat spatiotemporal covariances as 3d observations
Possible alternatives:
- Specialized spatiotemporal covariance functions, i.e.
\[ \gamma(\boldsymbol{s},\boldsymbol{s}', t,t') = \sigma^2 (\lvert t - t'\rvert+1)^{-1} \exp\big(-\lVert\boldsymbol{s}-\boldsymbol{s}'\rVert (\lvert t-t' \rvert + 1)^{-\beta/2}\big) \]
* Mixtures of separable covariances, i.e.\[ w(\boldsymbol{s},t) = w_1(\boldsymbol{s},t) + w_2(\boldsymbol{s},t) \]
Sta 344 - Fall 2022